Advancing Robot Learning, Perception, and Manipulation with Latest NVIDIA Isaac Release
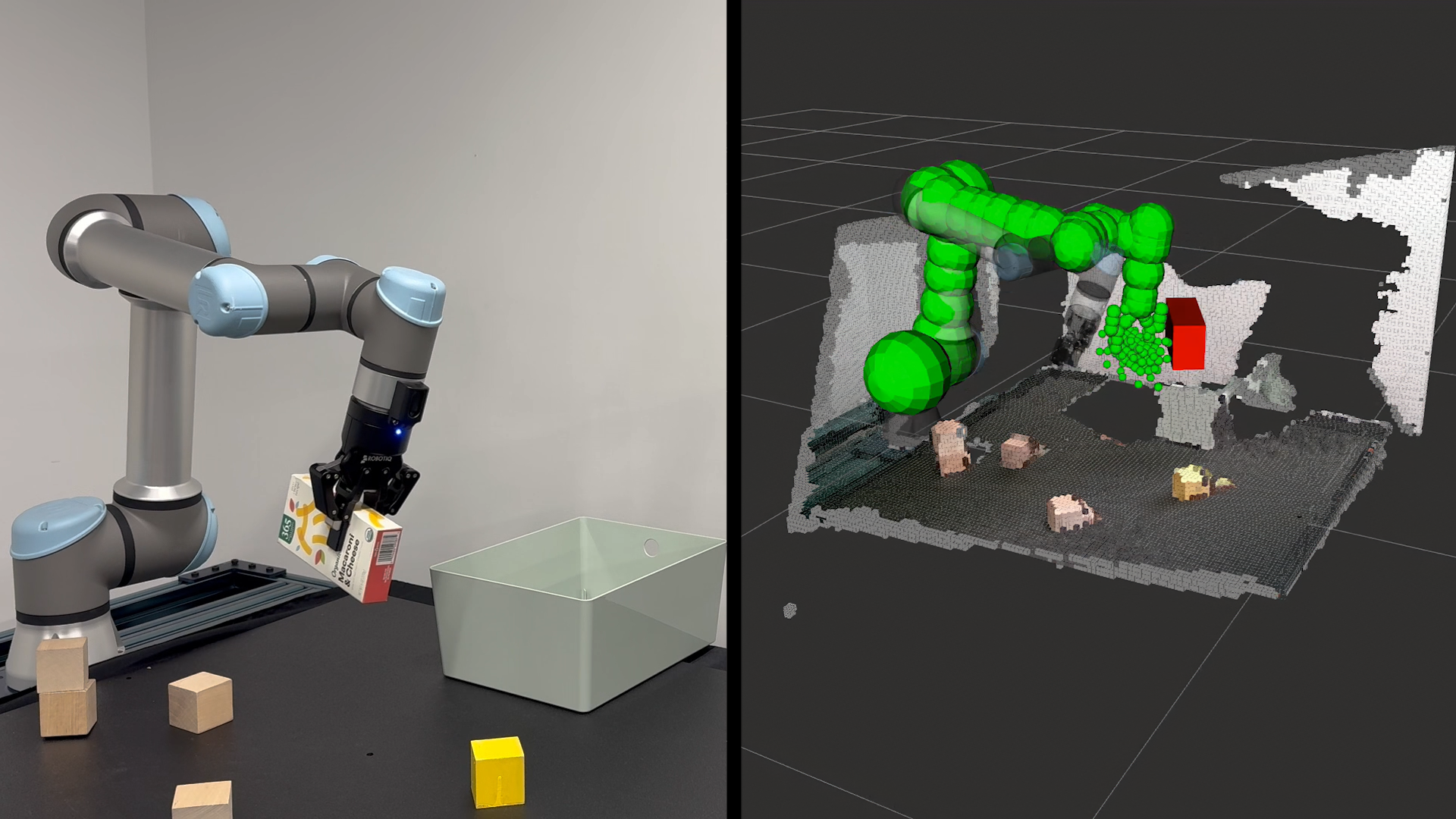
Table of Contents
Isaac Sim 4.5
NVIDIA Isaac Sim 4.5, launching at the end of January, brings several enhancements:
- Redesigned as a customizable reference application template
- Improved URDF import and setup
- Enhanced physics simulation and modeling
- Introduction of a new joint visualization tool
- Simulation accuracy and statistics visualization
- Addition of NVIDIA Cosmos world foundation model
Isaac Lab 2.0
NVIDIA Isaac Lab introduces the following updates:
- Open-source unified framework for robot learning
- Offers new features to train robot policies
Isaac Manipulator
NVIDIA Isaac Manipulator, built on ROS 2, now includes:
- New end-to-end reference workflows for pick-and-place and object-following tasks
- Developer support enhancements such as performance improvements and tutorials
Isaac Perceptor
NVIDIA Isaac Perceptor, developed on ROS 2, features:
- Utilization of CUDA-accelerated libraries, AI models, and reference workflows for AMRs
- Ecosystem adoption by industry partners for robotics development
Continue reading about the latest advancements in NVIDIA's robotics development tools and platforms for accelerated learning, perception, manipulation, and simulation.